Chapter 1 - Linear Equations in Linear Algebra
1.9 - The Matrix of a Linear Transformation
| Main: | Index |
| Previous: | 1.8 - Introduction to Linear Transformations |
| Next: | 2.1 - Matrix Operations |
Results
Theorem 1.10
Let T: ℝn→ℝm be a linear transformation. Then there
exists a unique matrix A such that
$$
T(\bs{x}) = A\bs{x}\qquad \forall\bs{x}\in\R^n.
$$
In fact, A is the m×n matrix whose jth column is the vector T(ej),
where ej is the jth column of the identity matrix in ℝn:
$$
A = \big[T(\bs{e}_1) \;\; \cdots \;\;T(\bs{e}_n)\big]
$$
Definition: Onto [Surjective]
A mapping $T: \R^n\rightarrow \R^m$ is said to be onto ℝm if each b
in ℝm is the image of at least one x in ℝn.
Definition: One-to-one [Injective]
A mapping $T: \R^n\rightarrow \R^m$ is said to be one-to-one if each b
in ℝm is the image of at most one x in ℝn.
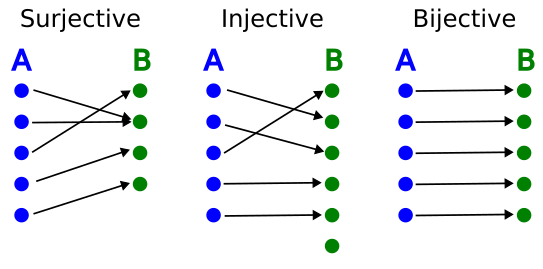
- Surjective, or onto, means that every point in B has some A. The set A 'fills' all of B.
- Injective, or one-to-one, means that no point in B can mapped to by many points in A.
- Bijective means both properties apply at the same time. Perfect pairing between sets.
Theorem 1.11
Let $T: \R^n\rightarrow\R^m$ be a linear transformation. Then T is one-to-one (injective) iff
the equation T(x) = 0 has only the trivial solution.
Theorem 1.12
Let $T: \R^n\rightarrow\R^m$ be a linear transformation and let A be the standard matrix
for T. Then:
a. T maps ℝn onto ℝm iff the columns of A span ℝm.
b. T is one-to-one iff the columns of A are linearly independent.
a. T maps ℝn onto ℝm iff the columns of A span ℝm.
b. T is one-to-one iff the columns of A are linearly independent.
Exercise 2
Let $T: \R^3\rightarrow\R^2$, T(e1) = (1, 3), T(e2) = (4, -7) and T(e3) = (-5, 4) where ei are the vectors of the identity matrix. Find the standard matrix of T.Answer
By Theorem 1.10, we have: $$ A = \big[T(\bs{e}_1) \;\; T(\bs{e}_2) \;\;T(\bs{e}_3)\big] = \begin{bmatrix*}[rrr] 1 & 4 & -5 \\ 3 & -7 & 4 \end{bmatrix*} $$
■
Exercise 10
T: ℝ2→ℝ2 first reflects points through the vertical x2-axis and then rotates points by $\pi/2$ radians. Find the standard matrix of T.Answer
The matrix for reflecting over the x2-axis (or y-axis) is given as: $$ A_1 = \begin{bmatrix*}[rr] -1 & 0 \\ 0 & 1 \end{bmatrix*} $$ The matrix for rotating points by a certain degree $\phi$: $$ A_2 = \begin{bmatrix*}[rr] \cos\phi & -\sin\phi \\ \sin\phi & \cos\phi \end{bmatrix*} $$ Multiplying them together gives us the matrix: $$ A = A_1A_2 = \begin{bmatrix*}[rr] -\cos\phi & -\sin\phi \\ -\sin\phi & \cos\phi \end{bmatrix*} $$ Putting in $\phi = \pi/2$. $$ A = \begin{bmatrix*}[rr] -\cos\pi/2 & -\sin\pi/2 \\ -\sin\pi/2 & \cos\pi/2 \end{bmatrix*} = \begin{bmatrix*}[rr] 0 & -1 \\ -1 & 0 \end{bmatrix*} $$ This is the same as reflection through the line $x_2 = -x_1$.
■
Exercise 19
Show that T is a linear transformation by finding a matrix that implements the mapping. $$ T(x_1,x_2,x_3) = (x_1 - 5x_2 + 4x_3, x_2 - 6x_3) $$Answer
Requires a 3×1 input vector, and outputs a 2×1 vector, so the matrix will be a 2×3 matrix. The first row will be: (1, -5, 4) and the second row will be (0, 1, -6). So: $$ A = \begin{bmatrix*}[rrr] 1 & -5 & 4 \\ 0 & 1 & -6 \end{bmatrix*} $$ Verifying: $$ \begin{bmatrix*}[rrr] 1 & -5 & 4 \\ 0 & 1 & -6 \end{bmatrix*} \begin{bmatrix*}[r] x_1 \\ x_2 \\ x_3 \end{bmatrix*} = \begin{bmatrix*}[rcrcr] (1)(x_1) &+& (-5)(x_2) &+& (4)(x_3) \\ (0)(x_1) &+& (1)(x_2) &+& (-6)(x_3) \end{bmatrix*} = \begin{bmatrix*}[r] x_1 - 5x_2 + 4x_3\\ x_2 - 6x_3 \end{bmatrix*} = T(x_1,x_2,x_3) $$
■
Exercise 23
Verifying statements. Answer True or False and justify the answer.(a) A linear transformation T: ℝn→ℝm is completely determined by its effect on the columns of the n×n identity matrix.
Answer: True. This is verified in Theorem 1.10.
(b) If T: ℝ2→ℝ2 rotates vectors about the origin by an angle $\phi$, then T is a linear transformation.
Answer: True. The standard matrix is: $$ A = \begin{bmatrix*}[rr] \cos\phi & -\sin\phi \\ \sin\phi & \cos\phi \end{bmatrix*} $$
(c) When two linear transformations are performed one after the another, the combined effect may not always be a linear transformation.
Answer: False. Every linear transformation is a matrix. When doing two of them this will simply correspond to multiplying the matrices.
(d) A mapping T: ℝn→ℝm is onto (surjective) ℝm if every vector x in ℝn maps onto some vector in ℝm.
Answer: False. It would be onto if every vector in ℝm has some associated vector in ℝn.
(e) If A is a 3×2 matrix, then the transformation x→Ax cannot be one-to-one.
Answer: False. The associated linear transformation would be T: ℝ2→ℝ3. The one-to-one (injective) mapping means that any point in ℝ3 has at most one associated point in ℝ2. If we define: $$ A = \begin{bmatrix*}[rr] 1 & 0 \\ 0 & 1 \\ 0 & 0 \end{bmatrix*} $$ then for some point (x1, x2): $$ \begin{bmatrix*}[rr] 1 & 0 \\ 0 & 1 \\ 0 & 0 \end{bmatrix*}\begin{bmatrix*}[r] x_1 \\ x_2 \end{bmatrix*} = \begin{bmatrix*}[rr] x_1 \\ x_2 \\ 0 \end{bmatrix*} $$ In this case we have constructed a one-to-one mapping, though only to a plane in ℝ3.
■
Exercise 24
Verifying statements. Answer True or False and justify the answer.(a) Not every linear transformation from ℝn to ℝm is a matrix transformation.
Answer: False. Not every linear transformation is a matrix transformation, but every linear transformation between ℝn and ℝm are. (See text after Theorem 1.10 in the text book).
(b) The columns of the standard matrix for a linear transformation from ℝn to ℝm are the images of the columns of the n×n matrix.
Answer: True. This is the statement from Theorem 1.10.
(c) The standard matrix of a linear transformation from ℝ2 to ℝ2 that reflects points through the horizontal axis, the vertical axis, or the origin has the form: $$ \begin{bmatrix*}[rr] a & 0 \\ 0 & d \end{bmatrix*}, $$ where a and d are +/-1.
Answer: True. Check reflection matrices on page 101.
(d) A mapping T: ℝn → ℝm is one-to-one if each vector in ℝn maps to a unique vector in ℝm.
Answer: False. The injective property only says that no two points in ℝn can map to the same point in ℝm. It does not say that it has to for each point in the domain.
(e) If A is a 3×2 matrix, then the transformation x→Ax cannot map ℝ2 to ℝ3.
Answer: True, assuming that we mean the entire space. Since ℝ3 is a bigger space, we can never find an associated point in ℝ2 for every point in ℝ3.
■
Exercise 35
If a linear transformation T: ℝn→ ℝm maps ℝn onto ℝm, can you give a relation between m and n? If T is one-to-one, what can you say about m and n?Answer
Assuming we mean filling the entire space. In order for a mapping to be 'onto' or surjective, it has to fill the entire codomain. This is only possible if the domain is larger than the codomain. In other words: n ≥ m.
If T is one-to-one, each point in the codomain has at most one point in the domain. In other words: n ≤ m.
■